工业机器人的工作原理是一个比较复杂的问题。简单地说,它的原理就是模仿人的各种肢体动作、思考方式和控制决策能力。从控制的角度,机器人可以通过如下四种方式来达到这一目标。
“示教再现”方式:它通过“示教盒”或人“手把手”两种方式教机械手如何动作,controller将示教过程记忆下来,然后机器人就按照记忆周而复始地重复示教动作,如喷涂机器人。
“可编程控制”方式:工作人员事先根据机器人的工作任务和运动轨迹编制控制程序,然后将控制程序输入给机器人的controller,起动控制程序,机器人就按照程序所规定的动作一步一步地去完成,如果任务变更,只要修改或重新编写控制程序,灵活方便。大多数工业机器人都是按照前两种方式工作的。 “
遥控”方式:由人用有线或无线remote control控制机器人在人难以到达或危险的场所完成某项任务。如防暴排险机器人、机器人、在有核辐射和化学污染环境工作的机器人等。
“自主控制”方式:是机器人控制中高度、复杂的控制方式,它要求机器人在复杂的非结构化环境中具有识别环境和自主决策能力,也就是要具有人的某些智能行为。
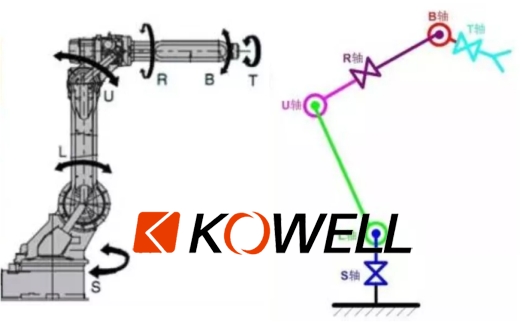
以六轴垂直多关节机器人为例(如下图),通过科为机器人controller及其控制系统,可实现S轴回旋,L轴下臂倾动,U轴上臂倾动,R轴手臂横摆,B轴手腕俯仰以及T轴的手腕回旋,实现六个轴的动作操作与配合。
|





